Teleoperação do G1
Os scripts de teleoperação estão no repositório unitree-g1.
A configuração ao final desse tutorial ficará como exemplificado no diagrama abaixo:
Configuração do roteador
Baseado na documentação do repositório xr_teleoperate:
Condições ideais de Wi-Fi:
- 5GHz
- Largura de 80MHz ou 160MHz
- Sinal em torno de -50 dBm ou melhor
- Pouca sobreposição de canais
Configuração no host
Adicione ao arquivo packages/unitree_sdk2_python/unitree_sdk2py/core/channel_config.py:
ChannelConfigAutoDetermine = '''<?xml version="1.0"?>
<CycloneDDS>
<Domain Id="any">
<General>
<Interfaces>
<NetworkInterface autodetermine="true"/>
</Interfaces>
<AllowMulticast>spdp</AllowMulticast>
<DontRoute>true</DontRoute>
</General>
<Discovery>
<Peers>
<Peer Address="192.168.123.161"/>
<Peer Address="192.168.123.164"/>
</Peers>
</Discovery>
</Domain>
</CycloneDDS>'''
Esta configuração é necessária porque o PC tem múltiplas interfaces de rede na mesma sub-rede:
enp194s0 = 192.168.123.2wlp195s0 = 192.168.123.106
Sem a configuração explícita do DDS, a descoberta pode escolher a interface errada ou rotear inconsistentemente.
Configuração do Meta Quest 3
Baseado nas instruções do repositório xr_teleoperate.
Ative o Modo Desenvolvedor no aplicativo Meta Horizon:
Dispositivos -> seu Quest 3 -> Configurações do headset -> Modo Desenvolvedor -> ATIVADO
Instalar adb no host
apt-get install adb
Liste os dispositivos:
sudo adb devices
List of devices attached
2G0YC5ZG6P005M unauthorized
- Coloque o Quest 3 enquanto ele está conectado via USB.
- Procure pelo alerta: Allow USB debugging?
- Selecione Always allow from this computer se disponível.
- Pressione Allow.
- Execute
sudo adb devicesnovamente.
Saída esperada:
2G0YC5ZG6P005M device
Inicie o redirecionamento de porta:
sudo adb -s 2G0YC5ZG6P005M reverse tcp:8012 tcp:8012
Verifique o resultado:
sudo adb -s 2G0YC5ZG6P005M reverse --list
Saída esperada:
UsbFfs tcp:8012 tcp:8012
Configurar o certificado HTTPS
Gere um certificado autoassinado (baseado na documentação da unitree):
openssl req -x509 -nodes -days 365 -newkey rsa:2048 -keyout key.pem -out cert.pem
Configuração do Host
Siga as instruções do repositório xr_teleoperate. Siga as instruções de instalação. Embora estejamos usando uv, para o XR teleoperate siga as recomendações do conda:
https://github.com/unitreerobotics/xr_teleoperate#1--installation
Configuração do PC2 (Unitree)
Copiar certificados
Use SSH para criar o diretório de configuração no PC2 e copie os arquivos:
ssh unitree@192.168.123.164 'mkdir -p ~/.config/xr_teleoperate'
scp /home/alfakini/Developer/unitreeG1/cert.pem /home/alfakini/Developer/unitreeG1/key.pem unitree@192.168.123.164:~/.config/xr_teleoperate/
Verifique no PC2:
ssh unitree@192.168.123.164 'ls -l ~/.config/xr_teleoperate/'
Saída esperada:
cert.pem
key.pem
Se o diretório teleimager no PC2 também esperar os arquivos diretamente:
scp /home/alfakini/Developer/unitreeG1/cert.pem /home/alfakini/Developer/unitreeG1/key.pem unitree@192.168.123.164:~/teleimager/
Instalar pacotes no PC2
Estas notas resumem a instalação realizada nesta máquina para que possa ser reproduzida em outro sistema Ubuntu estilo Unitree/Jetson.
1. Instalar Miniconda
wget https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-aarch64.sh -O /tmp/miniconda.sh
bash /tmp/miniconda.sh -b -u -p /home/unitree/miniconda3
rm /tmp/miniconda.sh
Se o Conda exigir aceitação dos Termos de Serviço do canal:
/home/unitree/miniconda3/bin/conda tos accept --override-channels --channel https://repo.anaconda.com/pkgs/main
/home/unitree/miniconda3/bin/conda tos accept --override-channels --channel https://repo.anaconda.com/pkgs/r
Inicialize o Conda para bash:
/home/unitree/miniconda3/bin/conda init bash
source ~/.bashrc
2. Criar ambiente teleimager
/home/unitree/miniconda3/bin/conda create -n teleimager python=3.10 -y
conda activate teleimager
3. Instalar pacotes do sistema
libusb-1.0-0-dev já estava instalado. libturbojpeg-dev não foi instalado porque o sudo exigia senha interativa.
Execute com acesso sudo:
sudo apt update
sudo apt install -y libusb-1.0-0-dev libturbojpeg-dev
4. Instalar Tele Imager
O repositório já existia em /home/unitree/teleimager.
cd /home/unitree/teleimager
/home/unitree/miniconda3/envs/teleimager/bin/python -m pip install -e ".[server]"
5. Correção de dependência
A versão atual do pacote logging_mp expõe getLogger, mas o Tele Imager 1.5.0 chama get_logger. Isso fazia tanto o teleimager-server quanto o teleimager-client falharem na inicialização.
O pyproject.toml local foi atualizado de:
"logging_mp",
para:
"logging_mp==0.1.6",
Em seguida, a instalação editável foi atualizada:
cd /home/unitree/teleimager
/home/unitree/miniconda3/envs/teleimager/bin/python -m pip install -e ".[server]"
6. Permissões UVC
O usuário já está no grupo video, mas a regra udev do UVC não foi instalada porque o sudo exigia senha interativa.
Execute com acesso sudo:
cd /home/unitree/teleimager
bash setup_uvc.sh
Isso instala /etc/udev/rules.d/10-libuvc.rules, recarrega as regras udev e tenta recarregar o driver uvcvideo.
7. Verificação
Verifique se os comandos estão disponíveis:
/home/unitree/miniconda3/envs/teleimager/bin/teleimager-server --help
/home/unitree/miniconda3/envs/teleimager/bin/teleimager-client --help
Execute a descoberta de câmera:
cd /home/unitree/teleimager
/home/unitree/miniconda3/envs/teleimager/bin/python -m teleimager.image_server --cf
O comando executou com sucesso. Pode exibir este log se o setup_uvc.sh não tiver sido executado:
Failed to reload driver: Command 'sudo modprobe -r uvcvideo' returned non-zero exit status 1.
Este erro é da etapa de recarga do driver (apenas sudo); a descoberta continua funcionando.
9. Uso típico
source ~/.bashrc
conda activate teleimager
cd /home/unitree/teleimager
teleimager-server --cf
Após preencher o cam_config_server.yaml, inicie o servidor:
teleimager-server
Adicionar Câmera
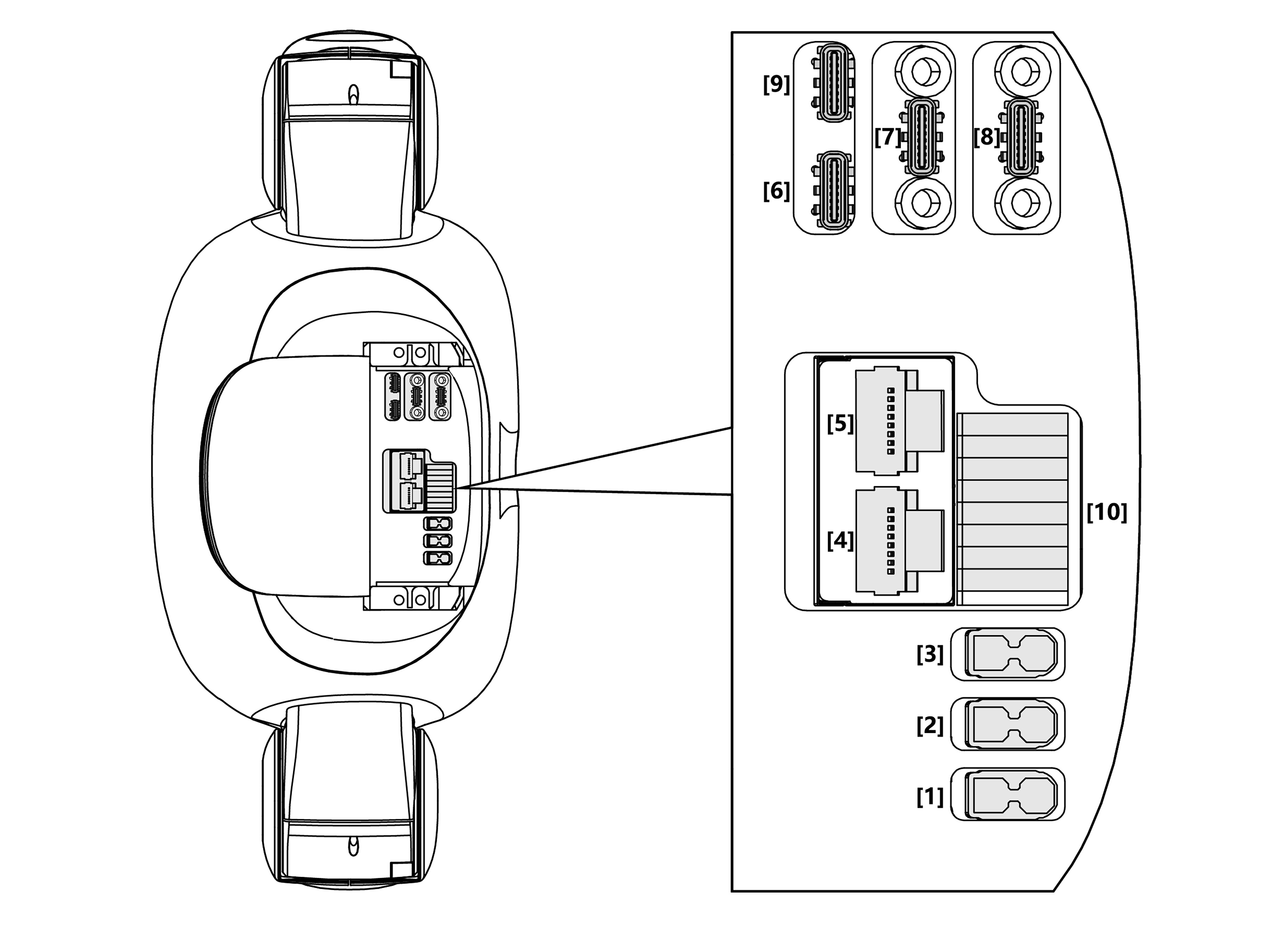
Para usar a RealSense, use a porta USB 9.
- https://support.unitree.com/home/en/G1_developer
- https://github.com/unitreerobotics/xr_teleoperate/wiki/Camera_and_Image
rs-enumerate-devices
Device info:
Name : Intel RealSense D435I
Serial Number : 406122071162
Firmware Version : 05.15.01.55
Recommended Firmware Version : 05.13.00.50
Physical Port : /sys/devices/platform/3610000.xhci/usb2/2-3/2-3:1.0/video4linux/video0
Debug Op Code : 15
Advanced Mode : YES
Product Id : 0B3A
Camera Locked : YES
8. Nota sobre RealSense
O modo RealSense requer pyrealsense2. As wheels pip disponíveis para pyrealsense2 em aarch64 exigiam GLIBC_2.32, mas o sistema Ubuntu do G1 tem GLIBC mais antigo. Versões testadas incluíram 2.58.1.10581 e 2.55.1.6486; ambas falharam com o mesmo requisito de GLIBC.
Para usar teleimager-server --cf --rs ou teleimager-server --rs, compile/instale librealsense e suas bindings Python localmente no sistema em vez de usar a wheel pip.